







 CRUAV
CRUAV
| CMU-EXPL 2019 CMU/TIC/0022/2019 1 year (Jan 2021 to Dec 2021) | |
| Summary: | This project investigates cooperative Unmanned Aerial Vehicles (UAVs), a.k.a. drones, for real-time surveillance of intelligent transportation systems in smart cities. The UAVs are equipped with wireless transceivers for data communication and lightweight onboard processors. An onboard unit (OBU) that is installed on the ground vehicle receives sensing data from intra-vehicle sensors while offering ad-hoc communications with the UAV. A ground-breaking cooperative trajectory planning algorithm using onboard reinforcement learning is proposed for multiple UAVs to collect the sensory data from the OBUs and forward them to remote ground stations, leveraging existing cellular infrastructures, e.g., cellular radio tower, and 3G/4G network. The real-time and reliable data delivery achieved by the proposed algorithm enables a variety of innovative applications spanning both the commercial and official sectors: providing road users with the latest information on traffic and monitoring possible traffic violations, for example. The final outcome of the project will be systematically evaluated for real-time airborne surveillance, based on realistic abstractions of airborne wireless communication. Hence, the design of the cooperative UAV network provides a significant contribution to the advancement of Information and Communication Technology (ICT). The project contributes primarily to the science and research priority area in Carnegie Mellon Portugal Program: Electrical and Computer Engineering. The project aims to address critical challenges of real-time data delivery for the ground vehicles, through the advancement of the reinforcement learning theory and technology to develop cooperative trajectory planning of the UAVs. Significantly, the achievements of this project can enhance the research and development on future UAV-assisted wireless networks in Portugal, e.g., 5G and Internet of Things. |
| Funding: | Global: 57.7KEUR, CISTER: 39.3KEUR |
| Partners: | |
| Contact Person at CISTER: | Kai Li |

CISTER uses AI technique in a new way to enable faster data collection using UAVs in large-area sensor networks
 The Journal Paper entitled "LSTM-characterized Deep Reinforcement Learning for Continuous Flight Control and Resource Allocation in UAV-assisted Sensor Network", authored by Kai Li, Wei Ni, Falko Dressler is published in IEEE Internet of Things Journal.
The Journal Paper entitled "LSTM-characterized Deep Reinforcement Learning for Continuous Flight Control and Resource Allocation in UAV-assisted Sensor Network", authored by Kai Li, Wei Ni, Falko Dressler is published in IEEE Internet of Things Journal.
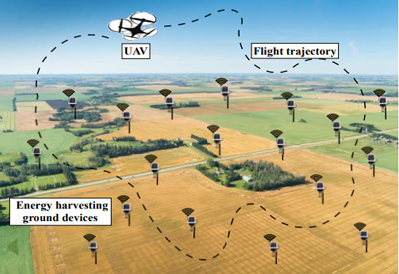
Unmanned aerial vehicles (UAVs) can be employed to collect sensory data in remote wireless sensor networks (WSN). This is useful in many real-life situations like agriculture monitoring, forest fire prevention and control, smart traffic management, and other similar situations where there is the need to gather information over very large areas but keeping costs and resource usage to the minimum while guaranteeing an adequate quality of service.
Due to UAV's maneuvering, scheduling a sensor device to transmit data can overflow data buffers of the unscheduled ground devices. Moreover, lossy airborne channels can result in packet reception errors at the scheduled sensor.
This paper proposes a new deep reinforcement learning based flight resource allocation framework (DeFRA) to minimize the overall data packet loss in a continuous action space. DeFRA is based on Deep Deterministic Policy Gradient (DDPG), optimally controls instantaneous headings and speeds of the UAV, and selects the ground device for data collection. Furthermore, a state characterization layer, leveraging long short-term memory (LSTM), is developed to predict network dynamics, resulting from time-varying airborne channels and energy arrivals at the ground devices.
To validate the effectiveness of DeFRA, experimental data collected from a real-world UAV testbed and energy harvesting WSN are utilized to train the actions of the UAV. Numerical results demonstrate that the proposed DeFRA achieves a fast convergence while reducing the packet loss by over 15%, as compared to existing deep reinforcement learning solutions.
Kai Li, Wei Ni, Alam Noor, Mohsen GuizaniIEEE Internet of Things Magazine (IoTM), IEEE. 2022.
 PDF
PDFKai Li, Wei Ni, Falko DresslerIEEE Internet of Things Journal (IOTJ), IEEE. 5, Aug, 2021.
Kai Li, Ning Lu, Jingjing Zheng, Pei Zhang, Wei Ni, Eduardo TovarACM Transactions on Cyber-Physical Systems (TCPS), ACM. 9, Feb, 2021.In press.
Kai Li, Wei Ni, Jingjing Zheng, Eduardo Tovar, Mohsen GuizaniIEEE Network (NET-M), IEEE. 2021.In press
Kai Li9AM to 10AM, 20 September 2021 (Monday)
Kai Li, Wei Ni, Harrison Kurunathan, Falko DresslerIEEE International Conference on Communications (ICC). 16 to 20, May, 2022, SAC - Aerial Communications Track. Seoul, South Korea.
Yousef Emami, Bo Wei, Kai Li, Wei Ni, Eduardo Tovar17th International Wireless Communications & Mobile Computing Conference (IWCMC 2021). 28, Jun to 2, Jul, 2021. Harbin, China.
Radha Reddy, Luís Almeida, Miguel Gutiérrez Gaitán, Harrison Kurunathan, Pedro Miguel Santos, Eduardo TovarWork in Progress Session, 42nd IEEE Real-Time Systems Symposium (RTSS) (RTSS). 2021. Dortmund, Germany.
Kai Li, Ning Lu, Jingjing Zheng, Pei Zhang, Wei Ni, Eduardo TovarDemo in International Conference on Sensing, Communication and Networking (SECON). 6 to 9, Jul, 2021, Demo. Virtual conference.